

{kind=link}
YOLO fashions have made important contributions to laptop imaginative and prescient in varied purposes, reminiscent of object detection, segmentation, pose estimation, automobile velocity detection, and multimodal duties. Whereas understanding their purposes is essential, it’s equally necessary to understand how these fashions are constructed and the way they work. This text will concentrate on that side.
On this article, we will likely be constructing the newest object detection mannequin, Yolov11 from scratch in Pytorch. If you’re new to YOLOv11, I might strongly suggest studying A Complete Information to YOLOv11 Object Detection.
Studying Aims
- Perceive the structure and key elements of YOLOv11 for superior object detection.
- Learn the way YOLOv11 handles multi-task studying for object detection, segmentation, and classification.
- Discover the function of YOLOv11’s spine and neck in enhancing mannequin efficiency.
- Look at the sensible purposes of YOLOv11 in real-world AI initiatives.
- Uncover how YOLOv11 optimizes effectivity for deployment in each edge and cloud environments.
This text was printed as part of the Information Science Blogathon.
What are YOLO Fashions?
YOLO (You Solely Look As soon as) fashions are identified for his or her effectivity and reliability in object detection duties. They provide an awesome steadiness of small mannequin sizes, excessive accuracy, and spectacular imply Common Precision (mAP) scores. The structure of YOLO fashions performs a key function of their success, with optimized pipelines for real-time detection and minimal computational overhead. Over time, varied YOLO variations have been launched, every introducing improvements to enhance efficiency, scale back latency, and increase software areas.
The YOLO household has developed considerably from its unique model, with every iteration—YOLOv2, YOLOv3, and past—providing enhancements in detection accuracy, velocity, and have extraction. Variations like YOLOv4 and YOLOv5 launched architectural developments, together with CSPNet and mosaic augmentation, enhancing efficiency. The later fashions, YOLOv6 to YOLOv8, targeted on creating light-weight architectures best for edge system deployment whereas sustaining excessive efficiency. YOLOv11, nonetheless, takes a special strategy, focusing extra on sensible purposes than conventional analysis, with Ultralytics emphasizing real-world options over tutorial documentation, signaling a shift in direction of application-driven improvement.
Ultralytics has not printed a proper analysis paper for YOLO11 as a result of quickly evolving nature of the fashions. We concentrate on advancing the expertise and making it simpler to make use of, slightly than producing static documentation. Supply
The accompanying desk offers a complete overview of the varied YOLO variations, mapping their parameters to corresponding mAP scores, providing precious insights into their comparative efficiency.
| Mannequin | Measurement (pixels) | mAPval | Pace (CPU ONNX) | Pace (T4 TensorRT10) | Params (M) | FLOPs (B) |
|---|---|---|---|---|---|---|
| YOLOv11n | 640 | 39.5 | 56.1 ± 0.8 | 1.5 ± 0.0 | 2.6 | 6.5 |
| YOLOv11s | 640 | 47.0 | 90.0 ± 1.2 | 2.5 ± 0.0 | 9.4 | 21.5 |
| YOLOv11m | 640 | 51.5 | 183.2 ± 2.0 | 4.7 ± 0.1 | 20.1 | 68.0 |
| YOLOv11 | 640 | 53.4 | 238.6 ± 1.4 | 6.2 ± 0.1 | 25.3 | 86.9 |
| YOLOv11x | 640 | 54.7 | 462.8 ± 6.7 | 11.3 ± 0.2 | 56.9 | 194.9 |
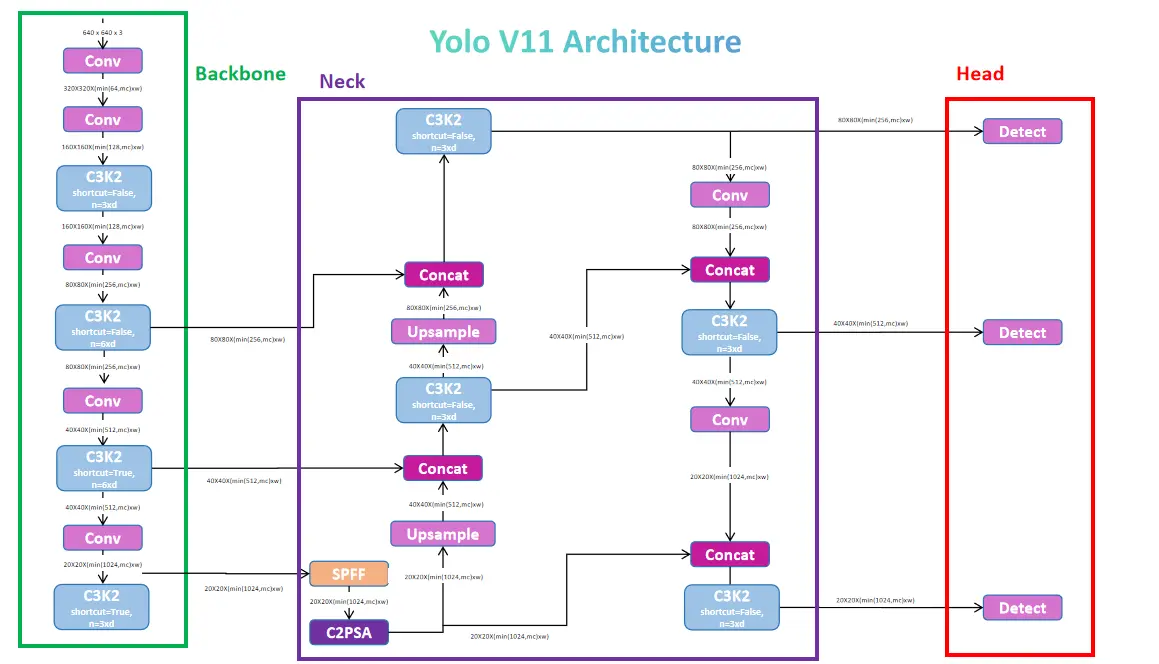
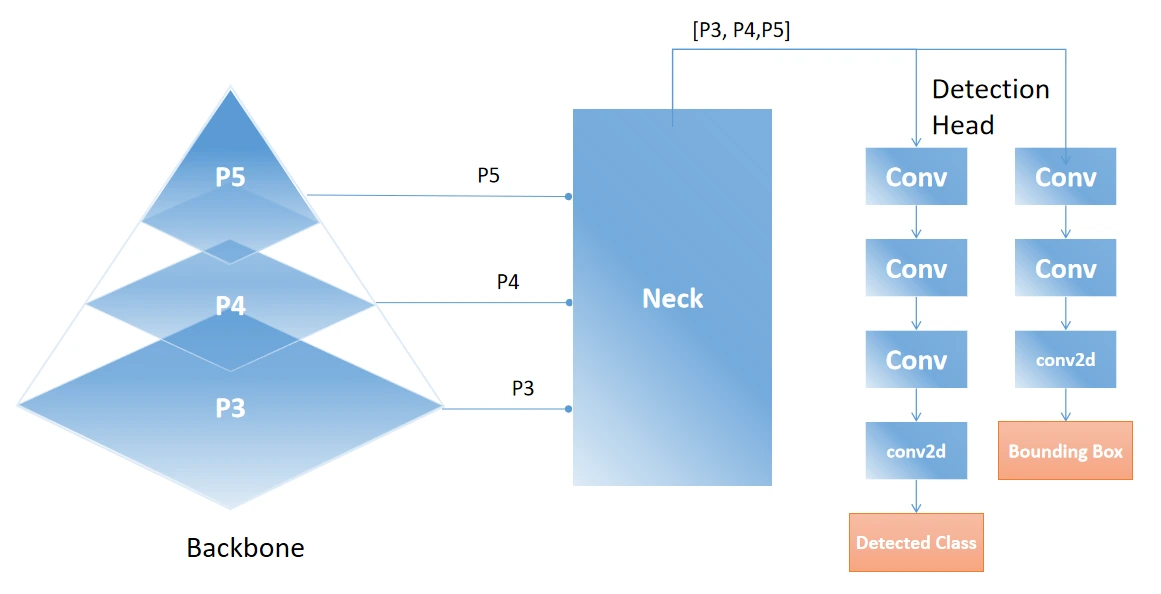
Diving into YOLOv11 Structure
The YOLO fashions have a 3-section structure: spine, neck, and head. The spine extracts helpful options from the picture utilizing environment friendly bottleneck-based blocks. The neck processes the output from the spine and passes the options to the top. The pinnacle defines the duty of the mannequin, with choices like object detection, semantic segmentation, keypoint detection, picture classification, and oriented object detection. This part additionally makes use of convolution blocks, however they’re task-specific, which we’ll focus on intimately later.
YOLO Mannequin Capabilities
Beneath we’ll look into some most typical YOLO mannequin capabilities:
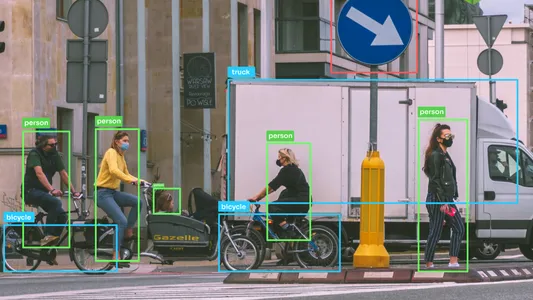
- Object Detection: Figuring out and finding objects inside a picture.
- Picture Segmentation: Detecting objects and delineating their boundaries.

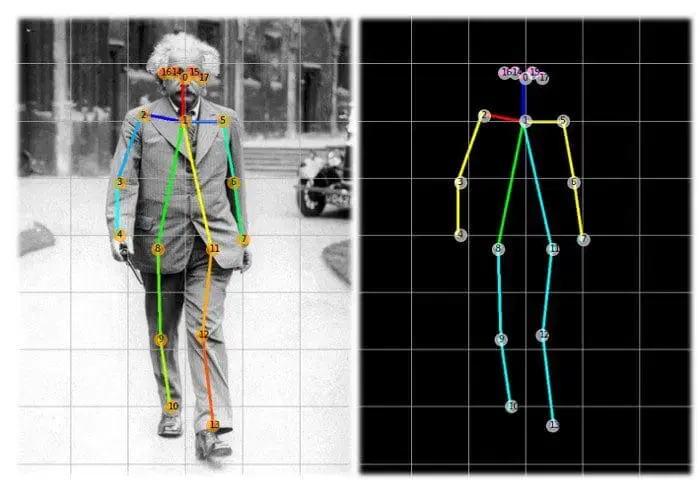
- Pose Estimation: Detecting and monitoring keypoints on human our bodies.
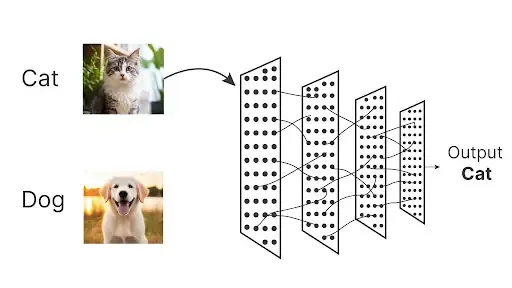
- Picture Classification: Categorizing photos into predefined courses.
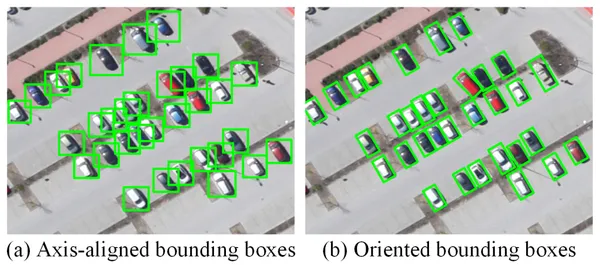
- Oriented Object Detection (OBB): Detecting objects with rotation for increased precision.
Exploring YOLOv11 Capabilities
The time period spine is often specified for the half the place the behind-the-scenes works are completed. That’s what is occurring within the Yolo fashions too. The principle job of any mannequin is to extract helpful options whereas contemplating parameters and velocity. The YoloV11 mannequin makes use of the DarkNet and DarkFPN spine, which is used to extract options. To get a greater understanding, assume the DarkNet mannequin is much like a CNN mannequin which is usually used for classification or different duties, however by eradicating the final layers of the mannequin which assist generate the outputs, we modify the structure in such a means that, it is going to be helpful for function extraction.
The spine within the YOLO mannequin is used to extract 3 ranges of various options. Excessive-level options which can be helpful for extracting data on detection options, semantic options, facial attributes, and so on. Medium-level options assist extract data on shapes, contours, ROIs, and patterns. Low-level options are helpful for detecting edges, shapes, textures, and gradients. The spine mannequin features a sequence of convolutional and bottleneck blocks, together with a hybrid block referred to as C2K3, which mixes each forms of blocks.
Core Elements of YOLOv11: Convolution and Bottleneck Layers
Beneath we’ll perceive the 2 most necessary layer:
Convolution Layer
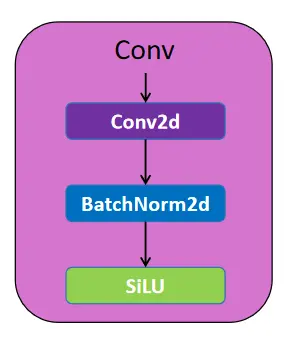
A convolutional layer is a part of a convolutional neural community (CNN) that extracts options from photos. A batch normalization layer independently normalizes a mini-batch of information throughout all observations for every channel. The Convolution Block consists of a convolutional layer and a Batch Normalization layer earlier than passing it to the SiLU activation operate.
BottleNeck Layer
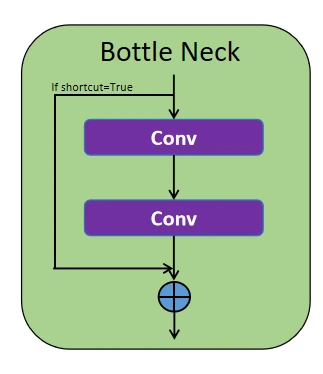
This block comprises two convolution blocks in sequence with a concatenation operate. If the shortcut parameter is true, the enter is concatenated with the output from the second convolution block. If false, solely the output from the second block is handed via. This construction is especially utilized in blocks like C3K2 and SPFF, enhancing effectivity and enhancing studying.
Code Blocks
These are the utils codes :
# The autopad is used to detect the padding worth for the Convolution layer
def autopad(ok, p=None, d=1):
if d > 1:
# precise kernel-size
ok = d * (ok - 1) + 1 if isinstance(ok, int) else [d * (x - 1) + 1 for x in k]
if p is None:
# auto-pad
p = ok // 2 if isinstance(ok, int) else [x // 2 for x in k]
return p
# That is the activation operate utilized in YOLOv11
class SiLU(nn.Module):
@staticmethod
def ahead(x):
return x * torch.sigmoid(x)Convolution Block (Con)
# The bottom Conv Block
class Conv(torch.nn.Module):
def __init__(self, in_ch, out_ch, activation, ok=1, s=1, p=0, g=1):
# in_ch = enter channels
# out_ch = output channels
# activation = the torch operate of the activation operate (SiLU or Identification)
# ok = kernel measurement
# s = stride
# p = padding
# g = teams
tremendous().__init__()
self.conv = torch.nn.Conv2d(in_ch, out_ch, ok, s, p, teams=g, bias=False)
self.norm = torch.nn.BatchNorm2d(out_ch, eps=0.001, momentum=0.03)
self.relu = activation
def ahead(self, x):
# Passing the enter by convolution layer and utilizing the activation operate
# on the normalized output
return self.relu(self.norm(self.conv(x)))
def fuse_forward(self, x):
return self.relu(self.conv(x))Bottleneck Block
# The Bottlneck block
class Residual(torch.nn.Module):
def __init__(self, ch, e=0.5):
tremendous().__init__()
self.conv1 = Conv(ch, int(ch * e), torch.nn.SiLU(), ok=3, p=1)
self.conv2 = Conv(int(ch * e), ch, torch.nn.SiLU(), ok=3, p=1)
def ahead(self, x):
# The enter is handed via 2 Conv blocks and if the shortcut is true and
# if enter and output channels are similar, then it would the enter as residual
return x + self.conv2(self.conv1(x))
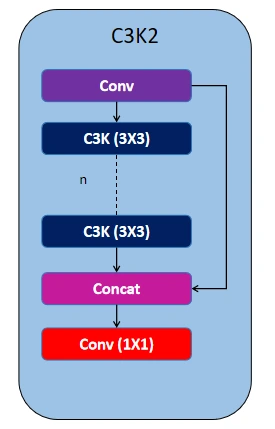
Now we you’ve got a quick understanding of the fundamental blocks, let’s dive into the structure of the spine. YOLOv11 makes use of C3K2 blocks to deal with function extraction at totally different phases of the spine. The C3K2 block makes use of small-size kernels for environment friendly capturing of options. This block is an replace over the earlier present block C2F which is utilized in Yolov8.
C3K Module
# The C3k Module
class C3K(torch.nn.Module):
def __init__(self, in_ch, out_ch):
tremendous().__init__()
self.conv1 = Conv(in_ch, out_ch // 2, torch.nn.SiLU())
self.conv2 = Conv(in_ch, out_ch // 2, torch.nn.SiLU())
self.conv3 = Conv(2 * (out_ch // 2), out_ch, torch.nn.SiLU())
self.res_m = torch.nn.Sequential(Residual(out_ch // 2, e=1.0),
Residual(out_ch // 2, e=1.0))
def ahead(self, x):
y = self.res_m(self.conv1(x)) # Course of half of the enter channels
# Course of the opposite half immediately, Concatenate alongside the channel dimension
return self.conv3(torch.cat((y, self.conv2(x)), dim=1))
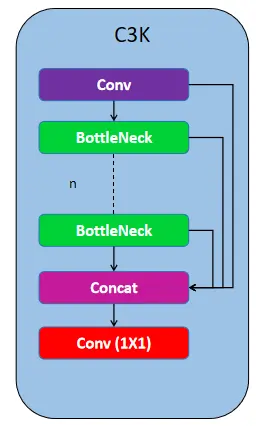
The C3K block consists of a Conv block adopted by a sequence of bottleneck layers, with every layer’s options concatenated earlier than passing via the ultimate 1×1 Conv layer. Within the C3K2 block, a Conv block is used first, adopted by a sequence of C3K blocks, after which handed to the 1×1 Conv block. This construction makes function extraction extra environment friendly in comparison with the earlier C2F block utilized in YOLOv8.
C3K2 Block Code
# The C3K2 Module
class C3K2(torch.nn.Module):
def __init__(self, in_ch, out_ch, n, csp, r):
tremendous().__init__()
self.conv1 = Conv(in_ch, 2 * (out_ch // r), torch.nn.SiLU())
self.conv2 = Conv((2 + n) * (out_ch // r), out_ch, torch.nn.SiLU())
if not csp:
# Utilizing the CSP Module when talked about True at shortcut
self.res_m = torch.nn.ModuleList(Residual(out_ch // r) for _ in vary(n))
else:
# Utilizing the Bottlenecks when talked about False at shortcut
self.res_m = torch.nn.ModuleList(C3K(out_ch // r, out_ch // r) for _ in vary(n))
def ahead(self, x):
y = checklist(self.conv1(x).chunk(2, 1))
y.lengthen(m(y[-1]) for m in self.res_m)
return self.conv2(torch.cat(y, dim=1))
The spine mannequin structure begin with a Conv Block for the given picture enter of measurement 640 and three channels after which continues with 4 units of Conv Block with C3K2 Block. Then lastly use a Spatial Pyramid Pooling Quick (SPFF) Block.
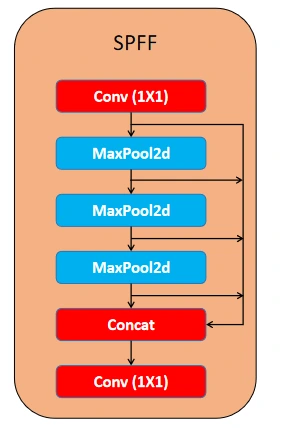
Spatial Pyramid Pooling and Fusion (SPPF) Layer
SPPF module (Spatial Pyramid Pooling Quick), which was designed to pool options from totally different areas of a picture at various scales. This improves the community’s potential to seize objects of various sizes, particularly small objects. It swimming pools options utilizing a number of max-pooling operations. The block comprises a 1X1 Conv Block adopted by a sequence of MaxPool2D Layers with a concat block utilizing all of the residuals from the Maxpool2D layers, after which ending with a 1X1 Conv Block.
We extract three outputs (function maps) from the spine, akin to totally different ranges of granularity within the picture. This strategy helps detect small objects in finer element (P5) and bigger objects via higher-level options (P3). Low-level options come from the 2nd set of Conv Block and C3K2 Block. Medium-level options are from the third set, whereas higher-level options come from the 4th set. Subsequently, for a given enter picture, the spine produces three outputs: P3, P4, and P5 in a listing.
Code Block for SPPF
# Code for SPFF Block
class SPPF(nn.Module):
def __init__(self, c1, c2, ok=5):
tremendous().__init__()
c_ = c1 // 2
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * 4, c2, 1, 1)
self.m = nn.MaxPool2d(kernel_size=ok, stride=1, padding=ok // 2)
def ahead(self, x):
x = self.cv1(x) # Beginning with a Conv Block
y1 = self.m(x) # First MaxPool layer
y2 = self.m(y1) # Second MaxPool layer
return self.cv2(torch.cat((x, y1, y2, self.m(y2)), 1)) # Ending with Conv BlockNeural Community Neck: Function Fusion and Transition Layer
Beneath part is a steady sequence of blocks used to course of the extracted options from the block. Earlier than diving into the neck part, YOLOv11 additionally makes use of the C2PSA block. This block helps course of low-level objects by using the eye mechanism.
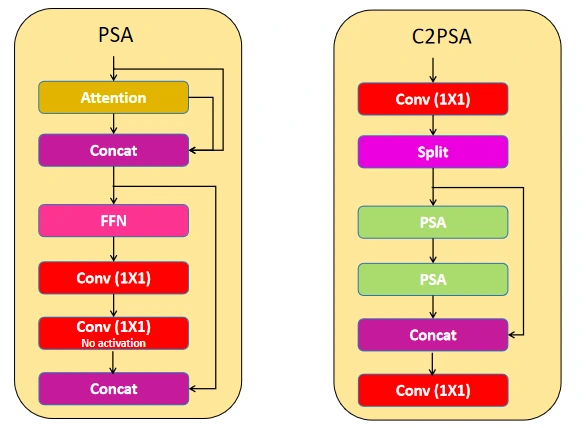
C2PSA
C2PSA refers to a Conv Block that makes use of two Partial Spatial Consideration (PSA) blocks. The PSA block combines Consideration, Conv, and FFNs to concentrate on the necessary objects within the function map given to it, and the modified model of PSA is C2PSA. This block begins with a 1×1 Conv Block, then splits the function map in half, sequentially making use of two PSA blocks. A concat block provides the output of the second PSA block to the unprocessed break up, and the block ends with one other 1×1 Conv block. This structure helps to course of the function maps in separate branches, and later concatenate. This ensures the mannequin focuses on data, computational value and accuracy concurrently.
Code for Consideration Module
The code defines an Consideration module that makes use of multi-head consideration. It initializes elements like question, key, and worth (QKV) layers and processes enter via convolution layers. Within the ahead technique, the enter is break up into queries, keys, and values, and a spotlight scores are computed. The output is a weighted sum of the values, refined via extra convolution layers, enhancing function illustration and capturing spatial dependencies.
# Code for the Consideration Module
class Consideration(torch.nn.Module):
def __init__(self, ch, num_head):
tremendous().__init__()
self.num_head = num_head
self.dim_head = ch // num_head
self.dim_key = self.dim_head // 2
self.scale = self.dim_key ** -0.5
self.qkv = Conv(ch, ch + self.dim_key * num_head * 2, torch.nn.Identification())
self.conv1 = Conv(ch, ch, torch.nn.Identification(), ok=3, p=1, g=ch)
self.conv2 = Conv(ch, ch, torch.nn.Identification())
def ahead(self, x):
b, c, h, w = x.form
qkv = self.qkv(x)
qkv = qkv.view(b, self.num_head, self.dim_key * 2 + self.dim_head, h * w)
q, ok, v = qkv.break up([self.dim_key, self.dim_key, self.dim_head], dim=2)
attn = (q.transpose(-2, -1) @ ok) * self.scale
attn = attn.softmax(dim=-1)
x = (v @ attn.transpose(-2, -1)).view(b, c, h, w) + self.conv1(v.reshape(b, c, h, w))
return self.conv2(x)Code for PSAModule
The PSABlock module combines consideration and convolutional layers to boost function illustration. It first applies an consideration module to seize dependencies, then processes the output via two convolution blocks. The ultimate output combines the unique enter and the processed options, enhancing data circulation and studying.
# Code for the PSAModule
class PSABlock(torch.nn.Module):
# This Module has a sequential of 1 Consideration module and a pair of Conv Blocks
def __init__(self, ch, num_head):
tremendous().__init__()
self.conv1 = Consideration(ch, num_head)
self.conv2 = torch.nn.Sequential(Conv(ch, ch * 2, torch.nn.SiLU()),
Conv(ch * 2, ch, torch.nn.Identification()))
def ahead(self, x):
x = x + self.conv1(x)
return x + self.conv2(x)
Code for C2PSA
Coming again to the neck half, it is usually part of the options extraction and this primarily focuses on options processing. The neck half processes the three ranges of options, every with totally different channel sizes. To sort out this, the mannequin adjusts all of the channels to the identical quantity after which extracts them utilizing intermediate layers. Let’s go within the element.
Implementation
# PSA Block Code
class PSA(torch.nn.Module):
def __init__(self, ch, n):
tremendous().__init__()
self.conv1 = Conv(ch, 2 * (ch // 2), torch.nn.SiLU())
self.conv2 = Conv(2 * (ch // 2), ch, torch.nn.SiLU())
self.res_m = torch.nn.Sequential(*(PSABlock(ch // 2, ch // 128) for _ in vary(n)))
def ahead(self, x):
# Passing the enter to the Conv Block and splitting into two function maps
x, y = self.conv1(x).chunk(2, 1)
# 'n' variety of PSABlocks are made sequential, after which passes one them (y) of
# the function maps and concatenate with the remaining function map (x)
return self.conv2(torch.cat(tensors=(x, self.res_m(y)), dim=1))
The low-level options (P5) are of form 20X20X1024, the medium-level options (P4) are of form 40X40X512 and the high-level options (P5) are of form 80X80X256. We first move the low-level options (output of SPFF) to C2PSA, which outputs attention-based options targeted on spatial data. We then upsample the output to the form of P4 and concatenate it with P4 options. Subsequent, we upsample the mixed options to the form of P3 and concatenate them with P3 options. This course of upscales and concatenates all of the options. Lastly, we ship the options to the C3K2 block to course of them higher utilizing the Bottlenecks.
We title the output of the C3K2 block as feat1, which represents the high-level options that will likely be despatched to the top part. We downsample feat1, concatenate it with P4, and ship it to the C3K2 block. The output, feat2, consists of the medium-level options that will likely be despatched to the top part. We repeat the identical course of with the low-level options, concatenate them with P5 (output of C2PSA), and ship them to the C3K2 block. The output, feat3, represents the low-level options despatched to the top part.
We’ll code the neck half eventually together with the top half.
The pinnacle part can have a listing of three outputs containing feat1, feat2, and feat3. Let’s discover the Head part and see how the three options are used for duties like Object Detection, Segmentation, and Keypoint Detection.
Understanding The Head
YOLO mannequin makes use of three job heads: the Detection Head, Segmentation Head, and Keypoint Detection Head.
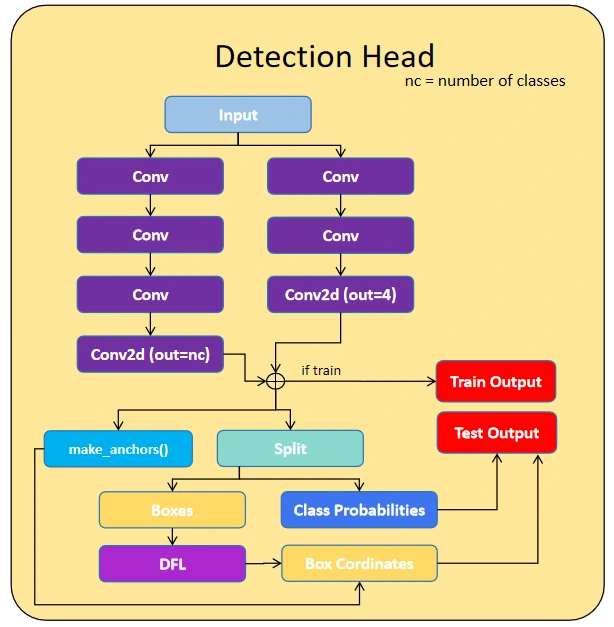
The principle head is the Detection Head, which makes use of three options for DFL (Focal Loss), Field Detection, and Class Detection. The DFL block calculates the focal loss, whereas the Field Detection consists of sequential convolution layers that output a form of 4, representing the coordinates of the field. Class Detection additionally makes use of sequential layers of the convolutional layer to course of the options utilizing the SiLU activation operate and output of a single class and later handed with the sigmoid operate to get a one-hot encoding output.
DFL Operate Code
class DFL(nn.Module):
# Distribution Focal Loss (DFL) proposed in Generalized Focal Loss https://ieeexplore.ieee.org/doc/9792391
def __init__(self, c1=16):
tremendous().__init__()
self.conv = nn.Conv2d(c1, 1, 1, bias=False).requires_grad_(False)
x = torch.arange(c1, dtype=torch.float)
self.conv.weight.knowledge[:] = nn.Parameter(x.view(1, c1, 1, 1))
self.c1 = c1
def ahead(self, x):
b, c, a = x.form
return self.conv(x.view(b, 4, self.c1, a).transpose(2, 1).softmax(1)).view(b, 4, a)
The segmentation and key level detection used this Detection block as their mum or dad class and processed their output in keeping with their shapes, segmentation outputs the form equal to the picture form and the important thing level detection outputs the form of [17,3] or [17,2] primarily based on the requirement. The important thing factors are typically 17 key factors for the individual 2 are the x and y coordinated 17 are the places within the individual, 3 are the x and y coordinated and one other variable indicating it’s for the visibility of key level functions.
Yolo Mannequin Variations
We all know that there are 5 variations of the YOLO mannequin, i.e., nano (n), small (s), medium (m), massive (l), and further massive (x). The principle distinction between these variations is the sizes of the function maps they course of. The function map shapes can decided utilizing the spine output shapes, for the nano variations the output function map shapes are 40x40x64, 20x20x128 and 20x20x256, for the small model we get the shapes, 40x40x128, 20x20x256 and 20x20x512.
We have to obtain the dynamic channel setting, to get this drawback solved we set depth and width whereas defining the mannequin and in addition point out when to make use of the C3K Modules for use within the C3K2 block as a listing of boolean values. These three inputs to the primary mannequin operate could make 5 variations of the YOLO mannequin from nano to additional massive. The depth is used within the spine to repeat the variety of C3K modules and the width represents the picture decision.
Full YOLOv11 Mannequin: Spine, Neck and Head
Let’s concentrate on the Object Detection job and Let’s Code the entire Yolo Mannequin.
The Spine
class DarkNet(torch.nn.Module):
def __init__(self, width, depth, csp):
tremendous().__init__()
self.p1 = []
self.p2 = []
self.p3 = []
self.p4 = []
self.p5 = []
# p1/2
self.p1.append(Conv(width[0], width[1], torch.nn.SiLU(), ok=3, s=2, p=1))
# p2/4
self.p2.append(Conv(width[1], width[2], torch.nn.SiLU(), ok=3, s=2, p=1))
self.p2.append(CSP(width[2], width[3], depth[0], csp[0], r=4))
# p3/8
self.p3.append(Conv(width[3], width[3], torch.nn.SiLU(), ok=3, s=2, p=1))
self.p3.append(CSP(width[3], width[4], depth[1], csp[0], r=4))
# p4/16
self.p4.append(Conv(width[4], width[4], torch.nn.SiLU(), ok=3, s=2, p=1))
self.p4.append(CSP(width[4], width[4], depth[2], csp[1], r=2))
# p5/32
self.p5.append(Conv(width[4], width[5], torch.nn.SiLU(), ok=3, s=2, p=1))
self.p5.append(CSP(width[5], width[5], depth[3], csp[1], r=2))
self.p5.append(SPP(width[5], width[5]))
self.p5.append(PSA(width[5], depth[4]))
self.p1 = torch.nn.Sequential(*self.p1)
self.p2 = torch.nn.Sequential(*self.p2)
self.p3 = torch.nn.Sequential(*self.p3)
self.p4 = torch.nn.Sequential(*self.p4)
self.p5 = torch.nn.Sequential(*self.p5)
def ahead(self, x):
p1 = self.p1(x)
p2 = self.p2(p1)
p3 = self.p3(p2)
p4 = self.p4(p3)
p5 = self.p5(p4)
return p3, p4, p5
The Neck
class DarkFPN(torch.nn.Module):
def __init__(self, width, depth, csp):
tremendous().__init__()
self.up = torch.nn.Upsample(scale_factor=2)
self.h1 = CSP(width[4] + width[5], width[4], depth[5], csp[0], r=2)
self.h2 = CSP(width[4] + width[4], width[3], depth[5], csp[0], r=2)
self.h3 = Conv(width[3], width[3], torch.nn.SiLU(), ok=3, s=2, p=1)
self.h4 = CSP(width[3] + width[4], width[4], depth[5], csp[0], r=2)
self.h5 = Conv(width[4], width[4], torch.nn.SiLU(), ok=3, s=2, p=1)
self.h6 = CSP(width[4] + width[5], width[5], depth[5], csp[1], r=2)
def ahead(self, x):
p3, p4, p5 = x
p4 = self.h1(torch.cat(tensors=[self.up(p5), p4], dim=1))
p3 = self.h2(torch.cat(tensors=[self.up(p4), p3], dim=1))
p4 = self.h4(torch.cat(tensors=[self.h3(p3), p4], dim=1))
p5 = self.h6(torch.cat(tensors=[self.h5(p4), p5], dim=1))
return p3, p4, p5
The Head
The make_anchors operate generates anchor factors and their corresponding strides for object detection. It processes function maps at totally different scales, making a grid of anchor coordinates (centre factors) with an non-obligatory offset for alignment. The operate outputs tensors of anchor factors and strides, that are essential for outlining areas in object detection duties the place bounding packing containers are predicted.
def make_anchors(x, strides, offset=0.5):
assert x shouldn't be None
anchor_tensor, stride_tensor = [], []
dtype, system = x[0].dtype, x[0].system
for i, stride in enumerate(strides):
_, _, h, w = x[i].form
sx = torch.arange(finish=w, system=system, dtype=dtype) + offset # shift x
sy = torch.arange(finish=h, system=system, dtype=dtype) + offset # shift y
sy, sx = torch.meshgrid(sy, sx)
anchor_tensor.append(torch.stack((sx, sy), -1).view(-1, 2))
stride_tensor.append(torch.full((h * w, 1), stride, dtype=dtype, system=system))
return torch.cat(anchor_tensor), torch.cat(stride_tensor)
The fuse_conv operate merges a convolution layer (conv) and a normalization layer (norm) right into a single convolution layer by adjusting its weights and biases. That is generally used throughout mannequin optimization for deployment, because it removes the necessity for separate normalization layers, enhancing inference velocity and decreasing reminiscence utilization with out altering the mannequin’s behaviour.
def fuse_conv(conv, norm):
fused_conv = torch.nn.Conv2d(conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
teams=conv.teams,
bias=True).requires_grad_(False).to(conv.weight.system)
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_norm = torch.diag(norm.weight.div(torch.sqrt(norm.eps + norm.running_var)))
fused_conv.weight.copy_(torch.mm(w_norm, w_conv).view(fused_conv.weight.measurement()))
b_conv = torch.zeros(conv.weight.measurement(0), system=conv.weight.system) if conv.bias is None else conv.bias
b_norm = norm.bias - norm.weight.mul(norm.running_mean).div(torch.sqrt(norm.running_var + norm.eps))
fused_conv.bias.copy_(torch.mm(w_norm, b_conv.reshape(-1, 1)).reshape(-1) + b_norm)
return fused_convThe Object Detection Head
class Head(torch.nn.Module):
anchors = torch.empty(0)
strides = torch.empty(0)
def __init__(self, nc=80, filters=()):
tremendous().__init__()
self.ch = 16 # DFL channels
self.nc = nc # variety of courses
self.nl = len(filters) # variety of detection layers
self.no = nc + self.ch * 4 # variety of outputs per anchor
self.stride = torch.zeros(self.nl) # strides computed throughout construct
field = max(64, filters[0] // 4)
cls = max(80, filters[0], self.nc)
self.dfl = DFL(self.ch)
self.field = torch.nn.ModuleList(
torch.nn.Sequential(Conv(x, field,torch.nn.SiLU(), ok=3, p=1),
Conv(field, field,torch.nn.SiLU(), ok=3, p=1),
torch.nn.Conv2d(field, out_channels=4 * self.ch,kernel_size=1)) for x in filters)
self.cls = torch.nn.ModuleList(
torch.nn.Sequential(Conv(x, x, torch.nn.SiLU(), ok=3, p=1, g=x),
Conv(x, cls, torch.nn.SiLU()),
Conv(cls, cls, torch.nn.SiLU(), ok=3, p=1, g=cls),
Conv(cls, cls, torch.nn.SiLU()),
torch.nn.Conv2d(cls, out_channels=self.nc,kernel_size=1)) for x in filters)
def ahead(self, x):
for i, (field, cls) in enumerate(zip(self.field, self.cls)):
x[i] = torch.cat(tensors=(field(x[i]), cls(x[i])), dim=1)
if self.coaching:
return x
self.anchors, self.strides = (i.transpose(0, 1) for i in make_anchors(x, self.stride))
x = torch.cat([i.view(x[0].form[0], self.no, -1) for i in x], dim=2)
field, cls = x.break up(split_size=(4 * self.ch, self.nc), dim=1)
a, b = self.dfl(field).chunk(2, 1)
a = self.anchors.unsqueeze(0) - a
b = self.anchors.unsqueeze(0) + b
field = torch.cat(tensors=((a + b) / 2, b - a), dim=1)
return torch.cat(tensors=(field * self.strides, cls.sigmoid()), dim=1)
Defining the YOLOv11 Mannequin
class YOLO(torch.nn.Module):
def __init__(self, width, depth, csp, num_classes):
tremendous().__init__()
self.internet = DarkNet(width, depth, csp)
self.fpn = DarkFPN(width, depth, csp)
img_dummy = torch.zeros(1, width[0], 256, 256)
self.head = Head(num_classes, (width[3], width[4], width[5]))
self.head.stride = torch.tensor([256 / x.shape[-2] for x in self.ahead(img_dummy)])
self.stride = self.head.stride
self.head.initialize_biases()
def ahead(self, x):
x = self.internet(x)
x = self.fpn(x)
return self.head(checklist(x))
def fuse(self):
for m in self.modules():
if sort(m) is Conv and hasattr(m, 'norm'):
m.conv = fuse_conv(m.conv, m.norm)
m.ahead = m.fuse_forward
delattr(m, 'norm')
return selfDefining Totally different Variations of YOLOv11 Fashions
class YOLOv11:
def __init__(self):
self.dynamic_weighting = {
'n':{'csp': [False, True], 'depth' : [1, 1, 1, 1, 1, 1], 'width' : [3, 16, 32, 64, 128, 256]},
's':{'csp': [False, True], 'depth' : [1, 1, 1, 1, 1, 1], 'width' : [3, 32, 64, 128, 256, 512]},
'm':{'csp': [True, True], 'depth' : [1, 1, 1, 1, 1, 1], 'width' : [3, 64, 128, 256, 512, 512]},
'l':{'csp': [True, True], 'depth' : [2, 2, 2, 2, 2, 2], 'width' : [3, 64, 128, 256, 512, 512]},
'x':{'csp': [True, True], 'depth' : [2, 2, 2, 2, 2, 2], 'width' : [3, 96, 192, 384, 768, 768]},
}
def build_model(self, model, num_classes):
csp = self.dynamic_weighting[version]['csp']
depth = self.dynamic_weighting[version]['depth']
width = self.dynamic_weighting[version]['width']
return YOLO(width, depth, csp, num_classes)Evaluation of Mannequin
Now that now we have outlined our mannequin, we should test whether or not all of the code blocks and the entire mannequin structure are accurately designed. To do that, we have to outline the mannequin, test for the mannequin parameters, and cross-check with the official parameter depend given. This technique permits us to verify that the mannequin structure is constructed accurately. To do that, we have to set up a library named thop.
GFLOPS : (Giga Floating-Level Operations Per Second)
This metric measures a mannequin’s computation efficiency, significantly in laptop imaginative and prescient. It represents the variety of floating-point operations carried out per second. It’s crucial to test the use case and the connection between the mannequin and the respective {hardware}. A better GFLOPS worth sometimes signifies quicker processing, enabling real-time efficiency and supporting advanced fashions in purposes reminiscent of autonomous automobiles and medical imaging.
Checking the GLOPS
We are able to use the profile operate from thop library to test the GLOPS and parameters depend. First, we have to outline a random tensor of 3 channel picture of measurement 640. The enter tensor form must be within the dimension of (batch measurement, variety of channels, width, top). We declare this enter retailer it within the dummy_input variable, and initialize the mannequin of the nano model with 80 courses. Then we give the mannequin, dummy_input to the profile operate and it returns the FLOPS and Parameters. Then we print the FLOPS in Giga varieties, representing it as GLOPS and the parameter depend of the mannequin. By this course of, we decide the GLOPS and Parameter depend utilizing the thop library.
!pip set up thop
from thop.profile import profile
dummy_input = torch.randn(1, 3, 640, 640)
mannequin = YOLOv11().build_model(model='n', num_classes=80)
flops, params = profile(mannequin, (dummy_input,), verbose=False)
print(f"Params: {params / 1e6:.3f}M")
print(f"GFLOPs: {flops / 1e9:.3f}")
These are the mannequin parameters that now we have acquired and so they match with the official parameters depend given by the Ultralytics, Therefore our mannequin constructing is appropriate! Supply
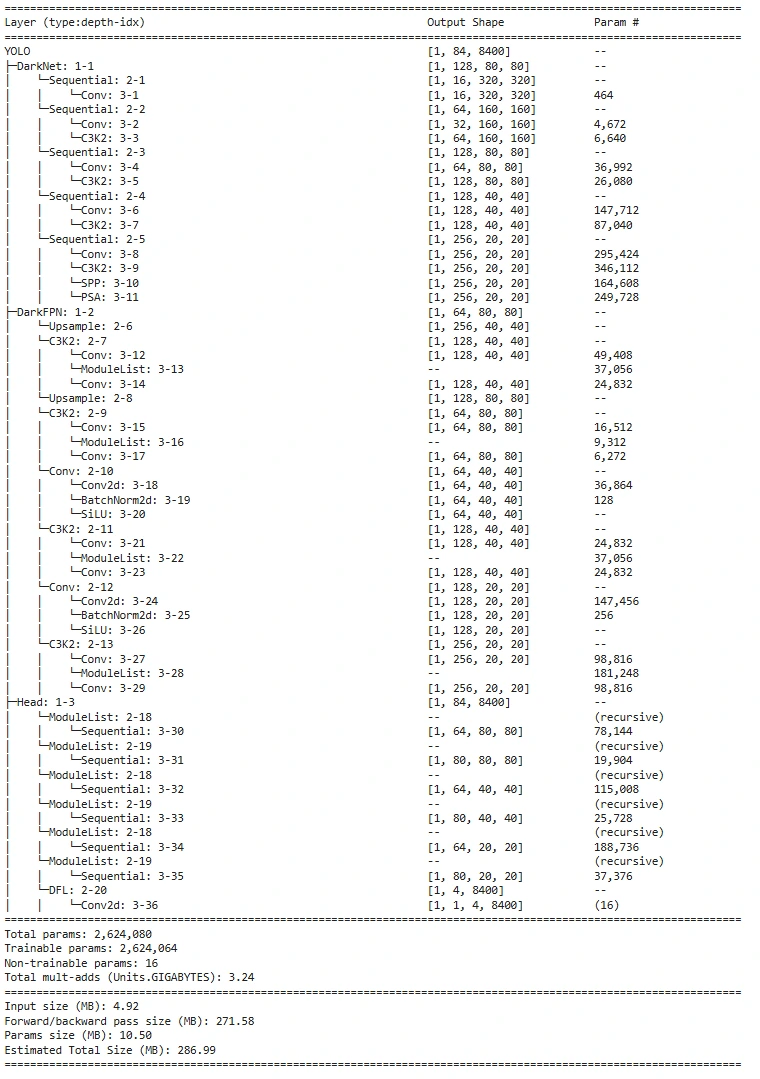
Mannequin Structure
To research the mannequin structure and decide, indicating every layer and its output form of the function map, we use the torchinfo library to point out the mannequin structure with parameters depend. This is called mannequin abstract, additionally we will likely be going to import the operate named abstract from the torchinfo. This operate takes enter from the mannequin and in addition the input_data to showcase the mannequin abstract, and input_data is non-obligatory. Right here is the code to print the mannequin abstract utilizing the torchinfo library.
!pip set up torchinfo
import torch
from torchinfo import abstract
# Realizing the system wherein the present env is working
system = torch.system("cuda" if torch.cuda.is_available() else "cpu")
# Creating enter tensor and shifting it to the system
dummy_input = torch.randn(1, 3, 640, 640).to(system)
# Creating the mannequin and shifting it to the system
mannequin = YOLOv11().build_model(model='n', num_classes=80).to(system)
# Now run the abstract operate from torchinfo
abstract(mannequin, input_data=dummy_input)
The output you get for the nano model
Yeah! You’ve discovered the best way to construct a mannequin from scratch by understanding its fundamentals. Nevertheless, the work of an actual laptop imaginative and prescient engineer is much from over. The subsequent step is writing the practice and take a look at code for datasets in COCO or YOLO format. For these interested by testing the mannequin, let’s dive into the best way to print the output for a random tensor.
Testing the Mannequin with random enter tensor
As an alternative of taking a significant picture, let’s use a random torch tensor for experimental and understanding functions. We give the tensor’s mannequin enter after which look at the mannequin output.
# the dummy enter of random values
dummy_input = torch.randn(1, 3, 640, 640)
# defining the mannequin of nano model
mannequin = YOLOv11().build_model(model='n', num_classes=80)
# lets print the output
output = mannequin(dummy_input)
print(f"Sort of the output :{sort(output)}, Size of the output: {len(output)}")
print(f"The shapes every output function map : {output[0].form, output[2].form, output[2].form}")
By this code, you see that the output from the mannequin isn’t the anticipated bounding field and sophistication, however as an alternative, we’re getting the three pyramid function maps output. As a result of the mannequin is defaulted in practice mode, these function maps would be the output when the mannequin is in practice mode. Let’s see what’s the output in eval mode.
# Transfer the mannequin to eval mannequin
mannequin.eval()
eval_output = mannequin(dummy_input)
# Let' see what are the outputs
print(f"Output form: {eval_output.form}")
# Anticipated consequence : torch.Measurement([1, 84, 8400])The output here’s a torch tensor of form [1,84,8400]. Right here 1 is the batch measurement of the enter, and 84 is the variety of outputs per anchor. It consists of 4 values for the bounding field and 80 class chances and 8400 is the full variety of anchors/predictions. From this, we’ll use an idea named Non-Most Suppression (NMS) which is a method utilized in object detection to remove redundant bounding packing containers for a similar object. It really works by rating predictions primarily based on their confidence scores and iteratively choosing the highest-scoring field whereas suppressing others with important overlap past a predefined threshold. This ensures that solely probably the most related and non-overlapping detections are retained, enhancing the readability and precision of the output. We’ll get again to this idea within the subsequent article.
What’s Subsequent?
If you’re considering that now we have constructed the mannequin and know the best way to course of the output too, then what’s subsequent? The subsequent job is said to dataset processing, coaching and validation knowledge loader, coaching code and testing code with efficiency metrics calculation. All matters will likely be utterly lined within the upcoming article, so keep tuned on Analytics Vidhya.
Conclusion
YOLOv11 continues the legacy of the YOLO household by introducing an optimized structure that balances accuracy, velocity, and effectivity. With its superior spine, neck, and head elements, the mannequin excels in duties like object detection, segmentation, and pose estimation. Its sensible, application-driven design makes it a strong software for real-world AI options, pushing the boundaries of deep learning-based detection fashions.
Key Takeaways
- YOLOv11 builds on earlier YOLO variations with an enhanced spine and have extraction strategies.
- It helps a number of duties, together with object detection, segmentation, and classification.
- The mannequin’s structure emphasizes effectivity with C3K and C3K2 modules for improved function studying.
- YOLOv11 prioritizes real-world purposes over conventional analysis documentation.
- Its optimized design makes it appropriate for deployment in edge and high-performance computing environments.
The media proven on this article shouldn’t be owned by Analytics Vidhya and is used on the Creator’s discretion.
I’m Nikhileswara Rao Sulake, a DRDO and DIAT licensed AI Skilled from Andhra Pradesh. I’m an AI practitioner working within the area of Deep Studying and Pc Imaginative and prescient. I’m proficient in ML, DL, CV, NLP and AR applied sciences. I’m at present engaged on analysis papers on Deep Studying and Pc Imaginative and prescient.